
Self-Driving Car Sim
Watch an autonomous car navigate a 2D track using PID control. Tweak the steering parameters and see how the algorithm keeps the car on course.
About Self-Driving Car Sim
You set three numbers — proportional, integral, and derivative gains — and then watch a small car attempt to follow a winding 2D track on its own. The car uses a PID controller, the same family of algorithms that steers real autonomous vehicles, industrial robots, and cruise-control systems. Nudge the parameters and the car might hug every curve cleanly; push them too far and it wobbles, overshoots, or spirals off the road entirely.
That cause-and-effect loop is the whole point. There's no score, no timer — just the satisfaction of tuning a feedback loop until the steering feels right. It's a surprisingly tactile way to build intuition for control theory without reading a single equation. If you enjoy hands-on systems like this, browse more interactive simulations in the catalog, or try Ant Colony to see another algorithm learn its environment in real time.
Works best on a desktop where you can fine-tune sliders precisely; a mouse gives you much more control than a touchscreen here.
Look inside
How to use
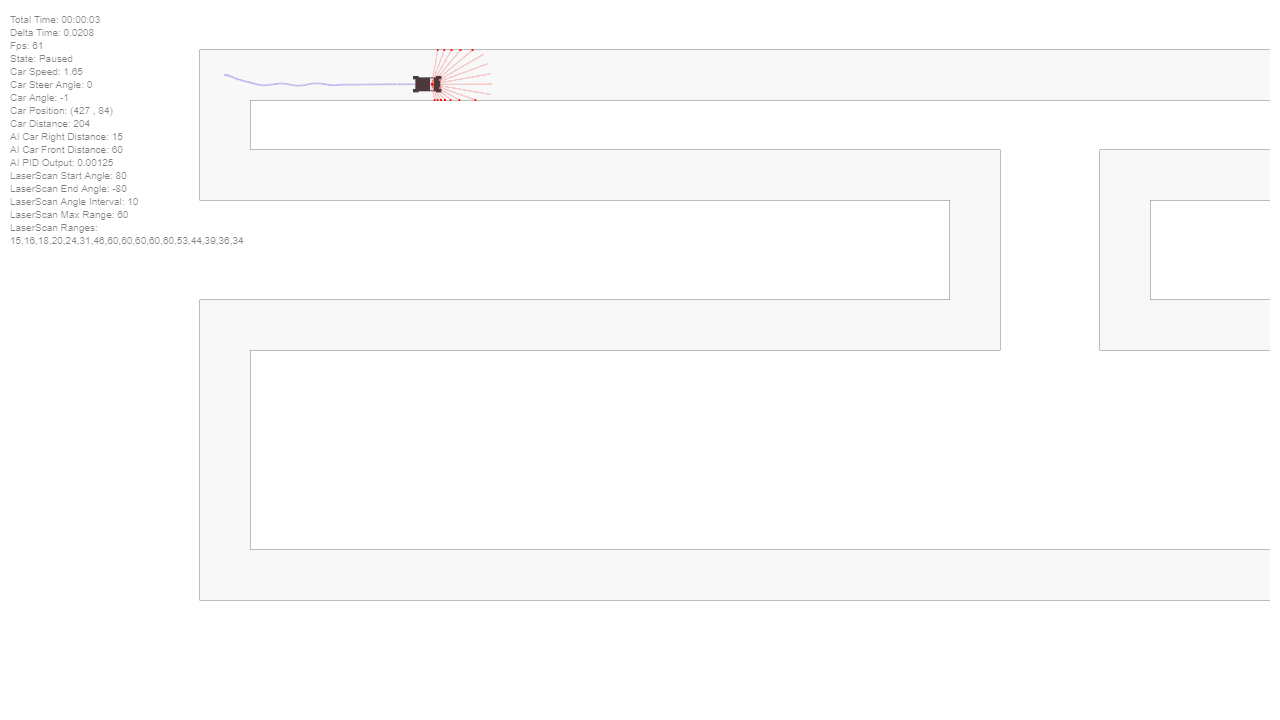
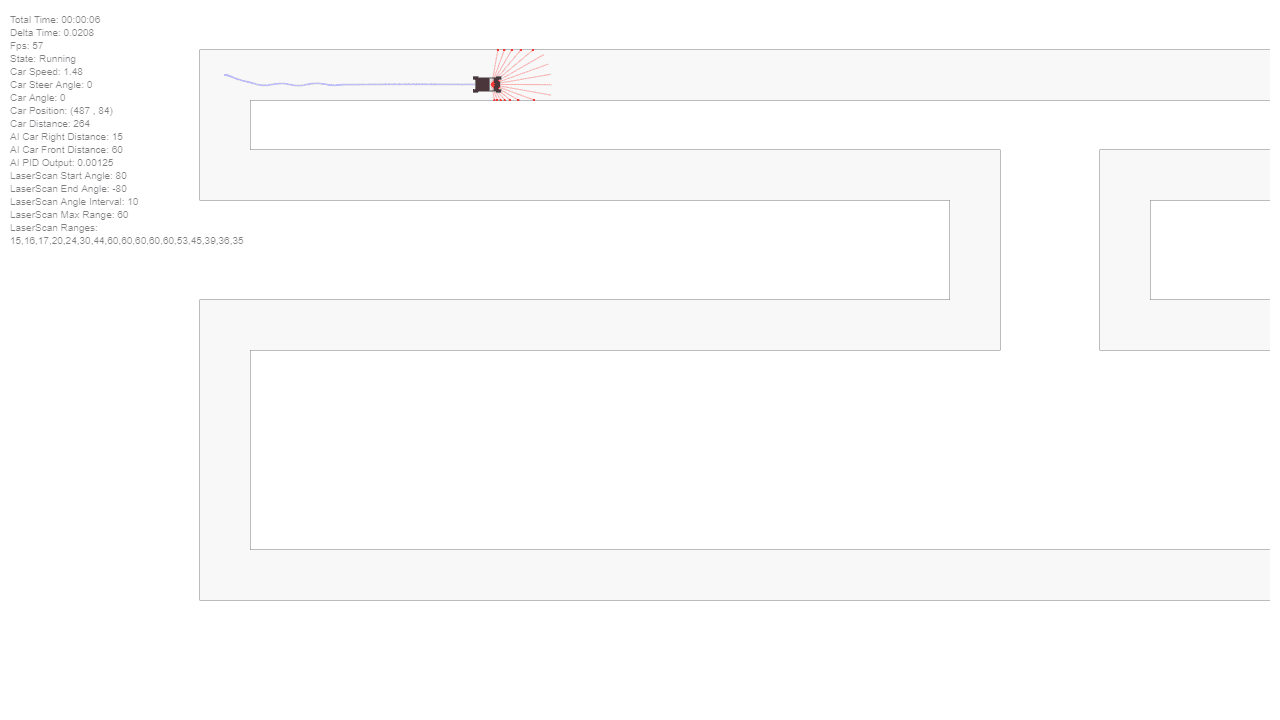
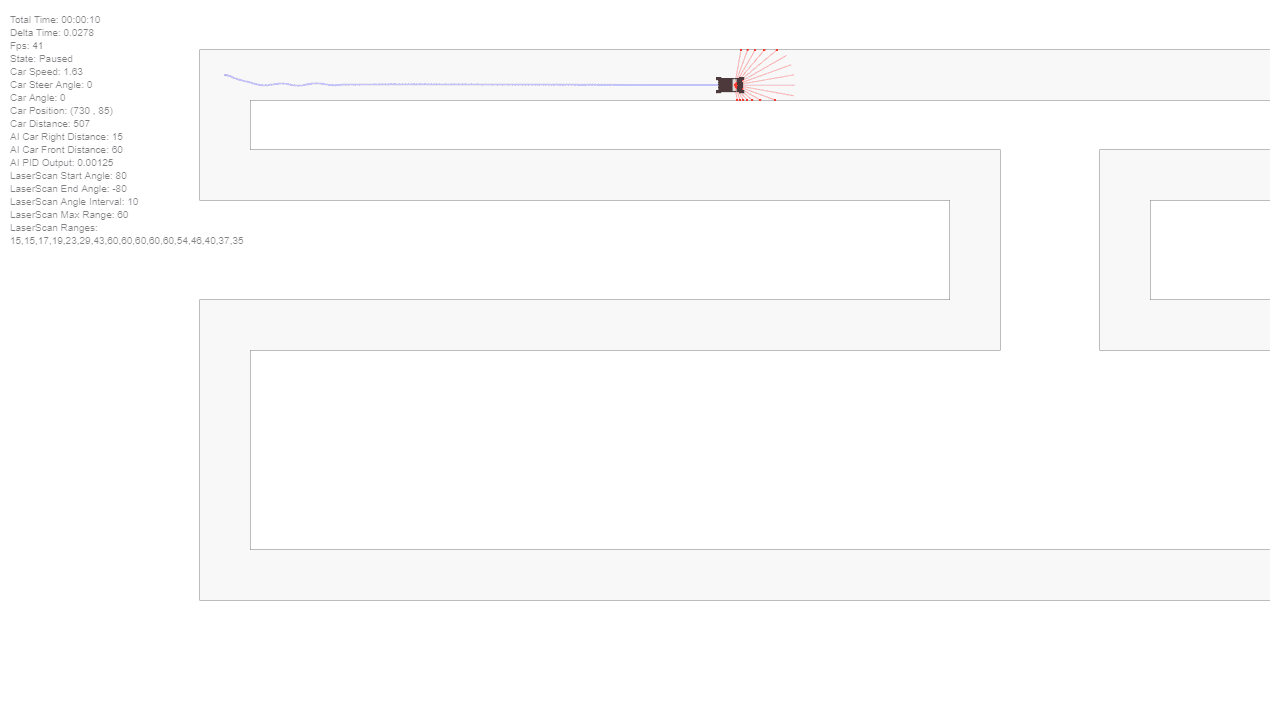
• Watch an autonomous car navigate a track using PID (Proportional-Integral-Derivative) control algorithms • The car uses laser sensors to detect track boundaries and automatically steers to stay on course • Mouse: Click and drag to pan the camera view around the track • Keyboard: Use arrow keys or WASD to manually adjust camera position • The simulation runs automatically - the car will attempt to complete laps without human input • Observe how the PID controller adjusts steering based on the car's distance from the track center • Red lines show laser sensor readings that help the car "see" track edges • Green indicators display the car's current speed and steering angle • The car may struggle on tight corners or crash if the PID values aren't properly tuned • This demonstrates real-world autonomous vehicle control systems in a simplified 2D environment
Reviews
No written reviews yet. Be the first!
More from Interactive

An interactive particle sandbox. Drop sand, water, fire, and more and watch elements interact in a mesmerizing physics simulation.
by mohanad-80






